
计算机控制技术-U4-常规控制技术
U4 常规控制技术
数字控制器的连续化设计
- 基本概念
- 数字控制器连续化设计原理
- 数字PID控制器设计
- 数字PID控制器改进
- 数字PID参数整定
- 数字PID的工程实现
4.1 基本概念




采样系统的Z变换





差分方程

4.2 数字控制器连续化设计原理


4.2.1 模拟控制器的离散化
1 前向差分法


后向差分法



双线性变换法(塔斯廷法)





频率弯翘


4.2.2 数字控制器连续化设计步骤
步骤:
按连续系统设计控制器
D(s)将
D(s)离散化为D(z)由计算机实现的数字控制器
D(z)数字仿真验证控制品质









例题



4.3 数字PID控制器的设计


4.3.1 模拟PID控制器


1.比例调节器 P

2.比例积分调节器 PI


3.比例微分调节 PD

4.比例积分微分调节 PID



4.3.2 数字PID控制器

1.位置型PID


2.增量型PID





4.4 数字PID控制器的改进
4.4.1 积分项的改进

- 抗积分饱和
- 积分分离
- 变速积分
- 消除积分不灵敏区
1.抗积分饱和




2.积分分离PID算法


3.变速积分PID算法


4.消除积分不灵敏区

4.4.2 微分项的改进

1.不完全微分PID控制


2.微分先行PID

4.4.3 其他PID改进方法
1.带死区的PID控制

2.时间最优PID控制

3.参数自寻优PID控制

4.5 数字PID参数整定
4.5.1 采样(控制)周期T的确定



4.5.2 PID参数的整定
1.理论整定法

2.试凑整定法




3.工程整定法
1)扩充临界比例度法



2)扩充响应曲线法


3)归一参数整定法

4)参数自整定法

4.6 数字PID控制器的工程实现



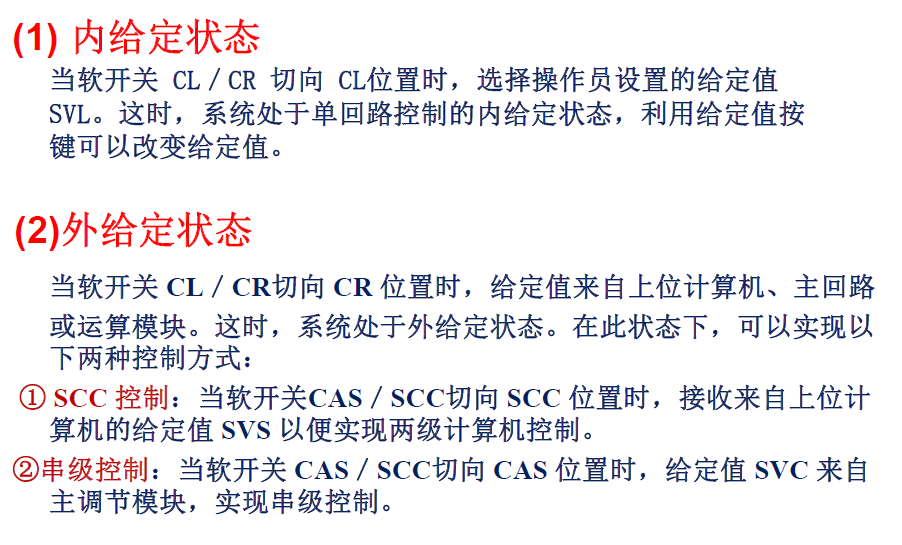
4.6.1 给定值处理







4.6.2 被控量处理


4.6.3 偏差处理




4.6.4 PID计算


4.6.5 控制量处理





4.6.6 自动手动切换







本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 梦翔!







